You are given an array start where start = [startX, startY] represents your initial position (startX, startY) in a 2D space. You are also given the array target where target = [targetX, targetY] represents your target position (targetX, targetY).
The cost of going from a position (x1, y1) to any other position in the space (x2, y2) is |x2 - x1| + |y2 - y1|.
There are also some special roads. You are given a 2D array specialRoads where specialRoads[i] = [x1i, y1i, x2i, y2i, costi] indicates that the ith special road can take you from (x1i, y1i) to (x2i, y2i) with a cost equal to costi. You can use each special road any number of times.
Return the minimum cost required to go from (startX, startY) to (targetX, targetY).
Example 1:
Input: start = [1,1], target = [4,5], specialRoads = [[1,2,3,3,2],[3,4,4,5,1]] Output: 5 Explanation: The optimal path from (1,1) to (4,5) is the following: - (1,1) -> (1,2). This move has a cost of |1 - 1| + |2 - 1| = 1. - (1,2) -> (3,3). This move uses the first special edge, the cost is 2. - (3,3) -> (3,4). This move has a cost of |3 - 3| + |4 - 3| = 1. - (3,4) -> (4,5). This move uses the second special edge, the cost is 1. So the total cost is 1 + 2 + 1 + 1 = 5. It can be shown that we cannot achieve a smaller total cost than 5.
Example 2:
Input: start = [3,2], target = [5,7], specialRoads = [[3,2,3,4,4],[3,3,5,5,5],[3,4,5,6,6]] Output: 7 Explanation: It is optimal to not use any special edges and go directly from the starting to the ending position with a cost |5 - 3| + |7 - 2| = 7.
Constraints:
start.length == target.length == 21 <= startX <= targetX <= 1051 <= startY <= targetY <= 1051 <= specialRoads.length <= 200specialRoads[i].length == 5startX <= x1i, x2i <= targetXstartY <= y1i, y2i <= targetY1 <= costi <= 105
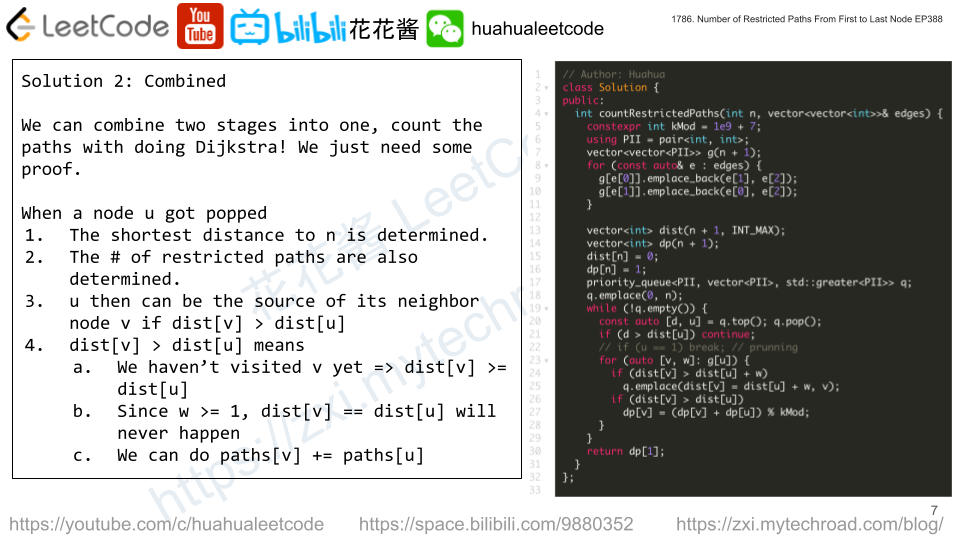
Solution: Dijkstra
- Create a node for each point in special edges as well as start and target.
- Add edges for special roads (note it’s directional)
- Add edges for each pair of node with default cost, i.e. |x1-x2| + |y1-y2|
- Run Dijkstra’s algorithm
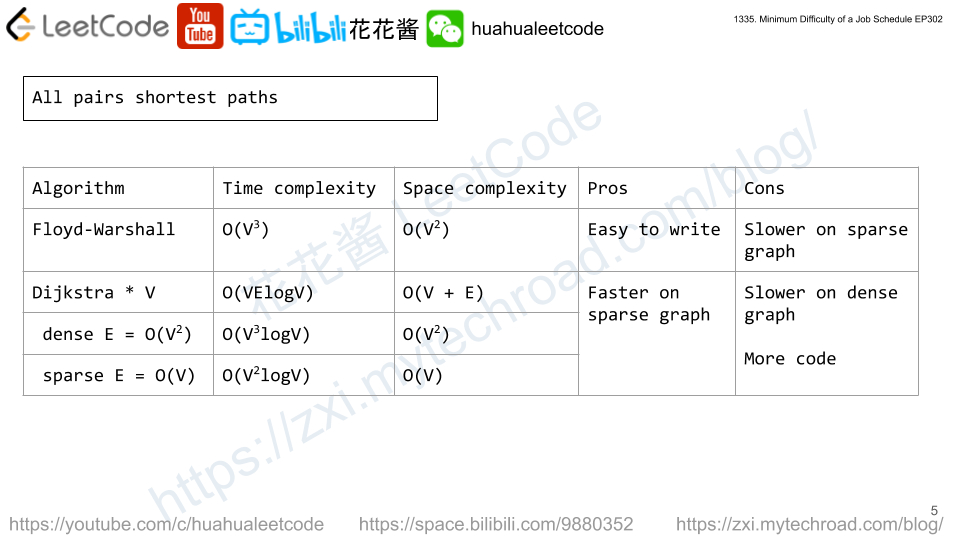
Time complexity: O(n2logn)
Space complexity: O(n2)
C++
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
// Author: Huahua class Solution { public: int minimumCost(vector<int>& start, vector<int>& target, vector<vector<int>>& specialRoads) { unordered_map<long, int> ids; vector<pair<int, int>> pos; auto getId = [&](int x, int y) { const auto key = ((unsigned long)x << 32) | y; if (ids.count(key)) return ids[key]; const int id = ids.size(); ids[key] = id; pos.emplace_back(x, y); return id; }; const int s = getId(start[0], start[1]); const int t = getId(target[0], target[1]); vector<vector<pair<int, int>>> g; auto addEdge = [&](int x1, int y1, int x2, int y2, int c = INT_MAX) { int n1 = getId(x1, y1); int n2 = getId(x2, y2); if (n1 == n2) return; while (g.size() <= max(n1, n2)) g.push_back({}); int cost = min(c, abs(x1 - x2) + abs(y1 - y2)); g[n1].emplace_back(cost, n2); // directional for special edge if (c == INT_MAX) g[n2].emplace_back(cost, n1); }; for (const auto& r : specialRoads) addEdge(r[0], r[1], r[2], r[3], r[4]); for (int i = 0; i < pos.size(); ++i) for (int j = i + 1; j < pos.size(); ++j) addEdge(pos[i].first, pos[i].second, pos[j].first, pos[j].second); vector<int> dist(ids.size(), INT_MAX); dist[s] = 0; priority_queue<pair<int, int>, vector<pair<int, int>>, greater<>> q; q.emplace(0, s); while (!q.empty()) { auto [d, u] = q.top(); q.pop(); if (d > dist[u]) continue; if (u == t) return d; for (auto [c, v] : g[u]) if (d + c < dist[v]) q.emplace(dist[v] = d + c, v); } return -1; } }; |