In a network of nodes, each node i is directly connected to another node j if and only if graph[i][j] = 1.
Some nodes initial are initially infected by malware. Whenever two nodes are directly connected and at least one of those two nodes is infected by malware, both nodes will be infected by malware. This spread of malware will continue until no more nodes can be infected in this manner.
Suppose M(initial) is the final number of nodes infected with malware in the entire network, after the spread of malware stops.
We will remove one node from the initial list. Return the node that if removed, would minimize M(initial). If multiple nodes could be removed to minimize M(initial), return such a node with the smallest index.
Note that if a node was removed from the initial list of infected nodes, it may still be infected later as a result of the malware spread.
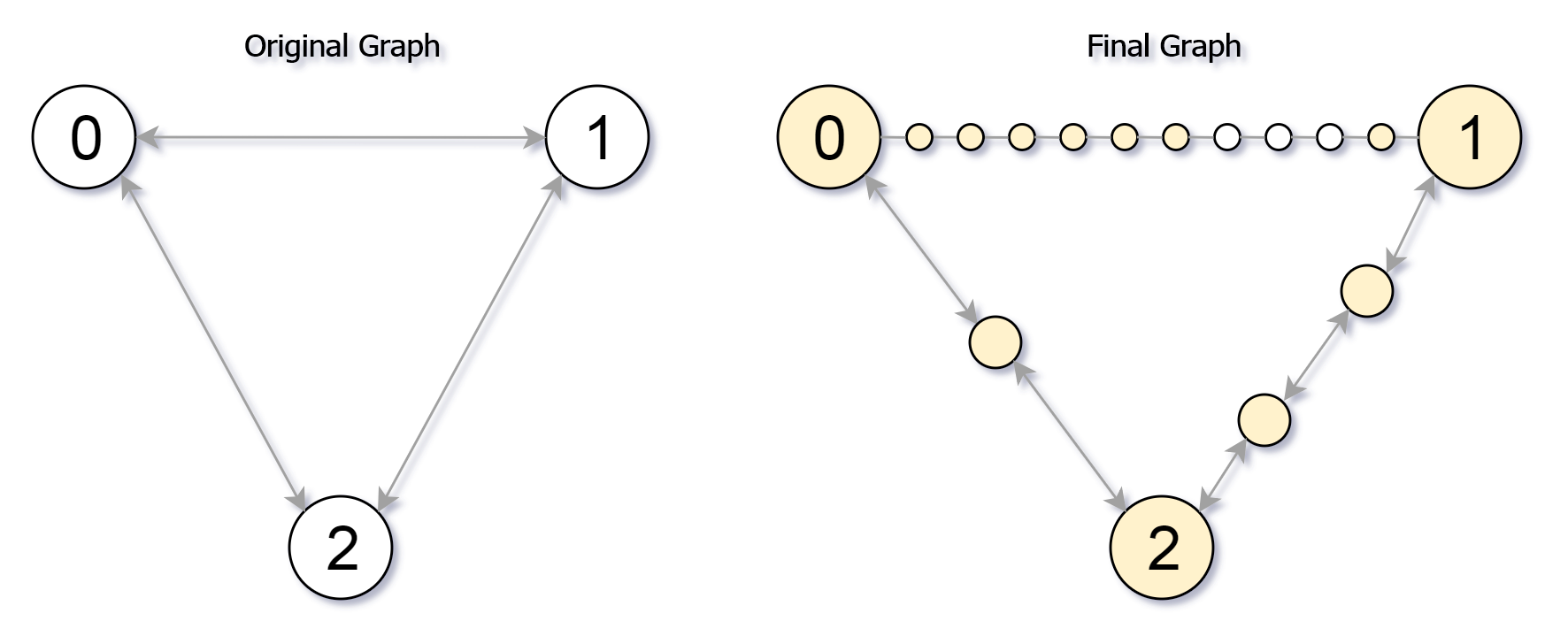
Starting with an undirected graph (the “original graph”) with nodes from 0 to N-1, subdivisions are made to some of the edges.
The graph is given as follows: edges[k] is a list of integer pairs (i, j, n) such that (i, j) is an edge of the original graph,
and n is the total number of new nodes on that edge.
Then, the edge (i, j) is deleted from the original graph, n new nodes (x_1, x_2, ..., x_n) are added to the original graph,
and n+1 new edges (i, x_1), (x_1, x_2), (x_2, x_3), ..., (x_{n-1}, x_n), (x_n, j) are added to the original graph.
Now, you start at node 0 from the original graph, and in each move, you travel along one edge.
Return how many nodes you can reach in at most M moves.
Example 1:
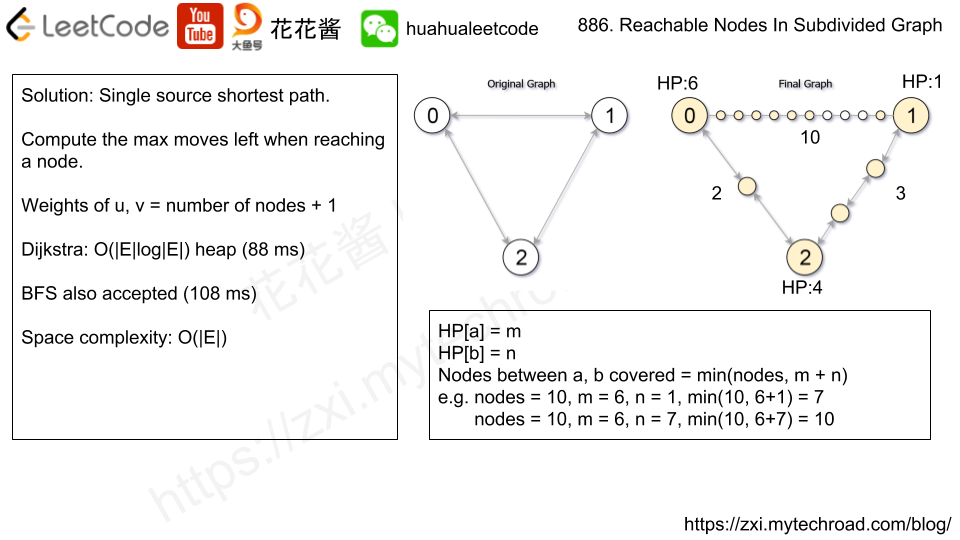
Input: edge = [[0,1,10],[0,2,1],[1,2,2]], M = 6, N = 3Output: 13Explanation: The nodes that are reachable in the final graph after M = 6 moves are indicated below.
Example 2:
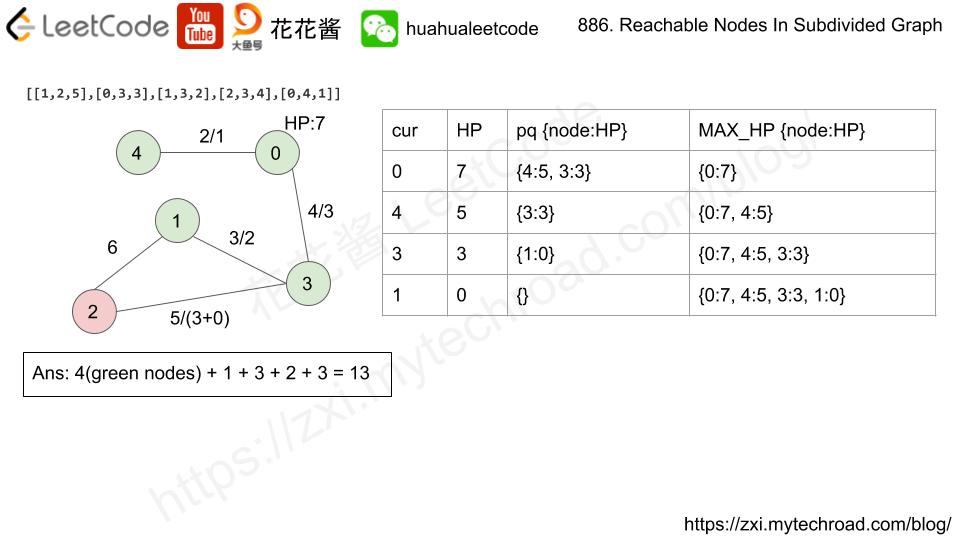
Input: edges = [[0,1,4],[1,2,6],[0,2,8],[1,3,1]], M = 10, N = 4
Output: 23
Note:
0 <= edges.length <= 10000
0 <= edges[i][0] < edges[i][1] < N
There does not exist any i != j for which edges[i][0] == edges[j][0] and edges[i][1] == edges[j][1].
The original graph has no parallel edges.
0 <= edges[i][2] <= 10000
0 <= M <= 10^9
1 <= N <= 3000
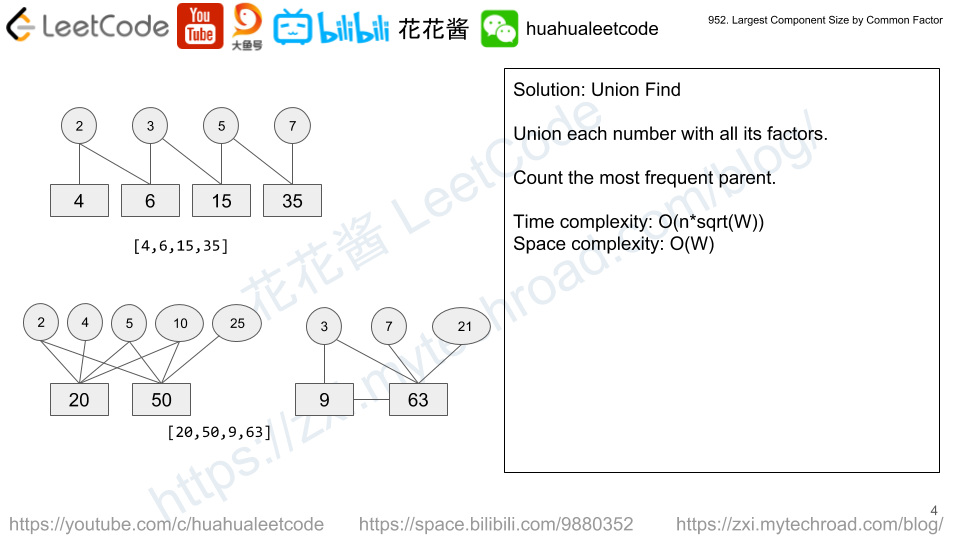
Solution: Dijkstra Shortest Path
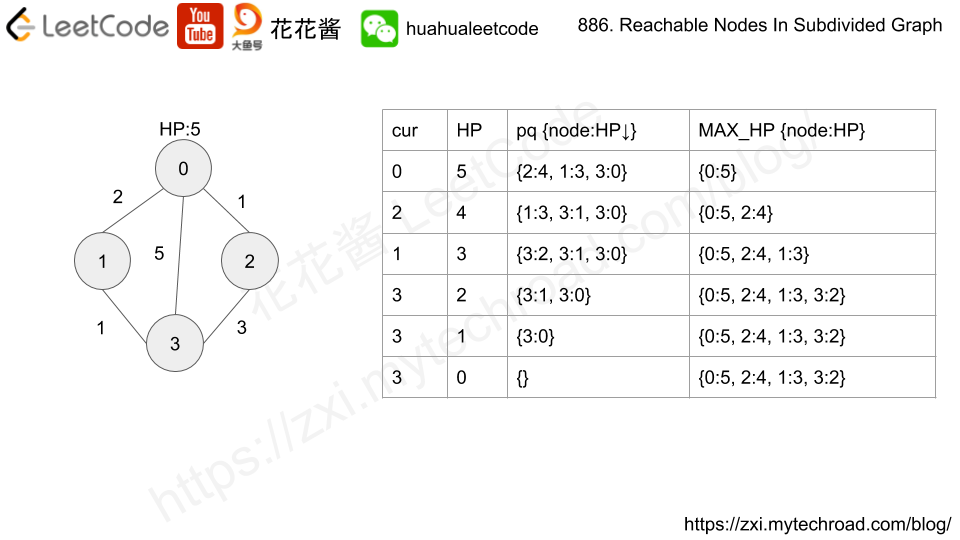
Compute the shortest from 0 to rest of the nodes. Use HP to mark the maximum moves left to reach each node.
HP[u] = a, HP[v] = b, new_nodes[u][v] = c
nodes covered between a<->b = min(c, a + b)
Time complexity: O(ElogE)
Space complexity: O(E)
C++
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
// Author: Huahua
// Running time: 88 ms
classSolution{
public:
intreachableNodes(vector<vector<int>>& edges, int M, int N) {
unordered_map<int, unordered_map<int, int>> g;
for(constauto& e : edges)
g[e[0]][e[1]] = g[e[1]][e[0]] = e[2];
priority_queue<pair<int,int>>q;// {hp, node}, sort by HP desc
unordered_map<int,int>HP;// node -> max HP left
q.push({M,0});
while(!q.empty()){
inthp=q.top().first;
intcur=q.top().second;
q.pop();
if(HP.count(cur))continue;
HP[cur]=hp;
for(constauto& pair : g[cur]) {
int nxt = pair.first;
intnxt_hp=hp-pair.second-1;
if(HP.count(nxt)||nxt_hp<0)continue;
q.push({nxt_hp,nxt});
}
}
intans=HP.size();// Original nodes covered.
for(constauto& e : edges) {
int uv = HP.count(e[0]) ? HP[e[0]] : 0;
intvu=HP.count(e[1])?HP[e[1]]:0;
ans+=min(e[2],uv+vu);
}
returnans;
}
};
Optimized Dijkstra (replace hashmap with vector)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
// Author: Huahua
// Running time: 56 ms (beats 88%)
classSolution{
public:
intreachableNodes(vector<vector<int>>& edges, int M, int N) {
Given an undirected graph, return true if and only if it is bipartite.
Recall that a graph is bipartite if we can split it’s set of nodes into two independent subsets A and B such that every edge in the graph has one node in A and another node in B.
The graph is given in the following form: graph[i] is a list of indexes j for which the edge between nodes i and j exists. Each node is an integer between 0 and graph.length - 1. There are no self edges or parallel edges: graph[i] does not contain i, and it doesn’t contain any element twice.
Example 1:Input: [[1,3], [0,2], [1,3], [0,2]]
Output: true
Explanation:
The graph looks like this:
0----1
| |
| |
3----2
We can divide the vertices into two groups: {0, 2} and {1, 3}.
Example 2:Input: [[1,2,3], [0,2], [0,1,3], [0,2]]
Output: false
Explanation:
The graph looks like this:
0----1
| \ |
| \ |
3----2
We cannot find a way to divide the set of nodes into two independent subsets.
Note:
graph will have length in range [1, 100].
graph[i] will contain integers in range [0, graph.length - 1].
graph[i] will not contain i or duplicate values.
The graph is undirected: if any element j is in graph[i], then i will be in graph[j].
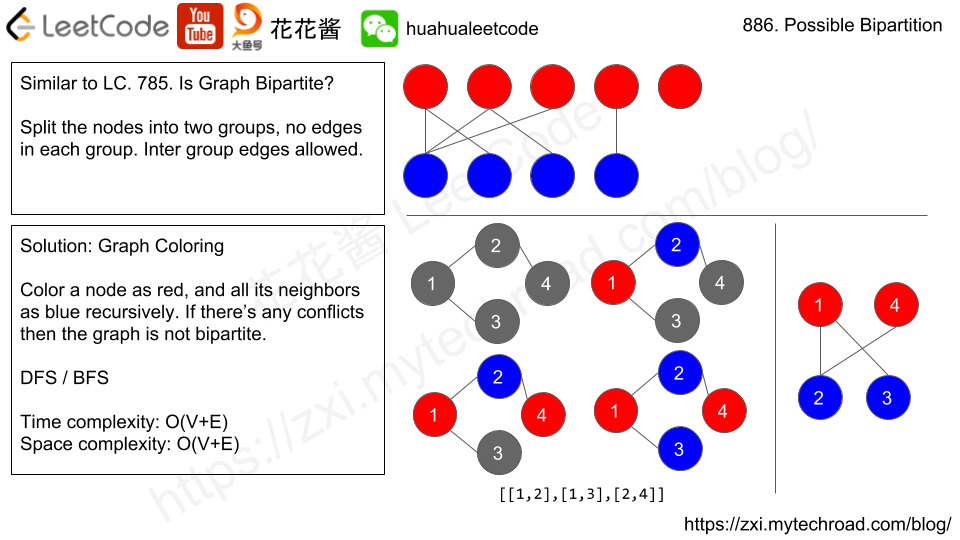
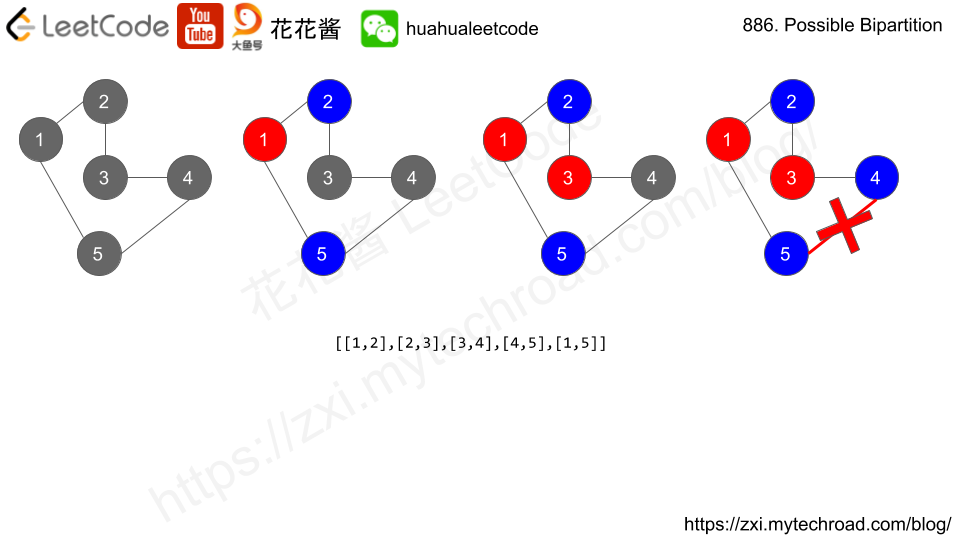
Solution: Graph Coloring
For each node
If has not been colored, color it to RED(1).
Color its neighbors with a different color RED(1) to BLUE(-1) or BLUE(-1) to RED(-1).
If we can finish the coloring then the graph is bipartite. All red nodes on the left no connections between them and all blues nodes on the right, again no connections between them. red and blue nodes are neighbors.
Time complexity: O(V+E)
Space complexity: O(V)
C++ / DFS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
// Author: Huahua
// Running time: 12 ms
classSolution{
public:
boolisBipartite(vector<vector<int>>& graph) {
const int n = graph.size();
vector<int>colors(n);
for(inti=0;i<n;++i)
if(!colors[i]&& !coloring(graph, colors, 1, i))
return false;
returntrue;
}
private:
boolcoloring(constvector<vector<int>>& graph, vector<int>& colors, int color, int node) {